
Behind the Scenes: NASA | ROVO

Background
My name is Lee Rosario Jr. and I am a professional Designer/CAD Draftsman at Leidos Engineering in sunny Orlando, Florida. I’ve used Blender on a regular basis for about 3 years now as my preferred tool for creative concept design. My fascination with 3D design began in 1993, at the age of 8, when I opened a library book on basic CAD design and has never left me since. I have always been fascinated by organic forms in nature and apply themes in nature to my designs on a regular basis. Many of my influences come from the works of designer Daniel Simon (Tron, Oblivion, Bugatti, Roborace) and design legend Luigi Colani.
I’ve had designs featured on international design publication Yanko Design, Blenderartists, BlenderNation and CG Masters. As a songwriter, I have songwriting credits on shows such as The Voice, WWE, Say Yes to the Dress, Mob Wives and for networks such as A&E, TLC, and Discovery Channel.
I earned a degree in Drafting and Design from Valencia College, which taught me how to approach design from an engineering standpoint; however, most of my experience is self-taught. I incorporate many of the principles I learned in college in my personal design projects and my dealings with independent clients. My technical training allowed me to expand my knowledge beyond Blender, as well as increasing my exposure to CAD platforms such as AutoCAD, Solidworks, Revit, Alias, Lumion, Keyshot and Sketchup.
Outside of my day job, I am an independent 3D designer with a lifelong passion for concept transportation design, arch viz and product design, but I also use my 3D design experience in working with various clients from multiple backgrounds. I have worked with various inventors to help realize their designs in the prototyping stages, graphic design presentations, marketing promo material, product development and patent documentation.
ROVO – Synopsis
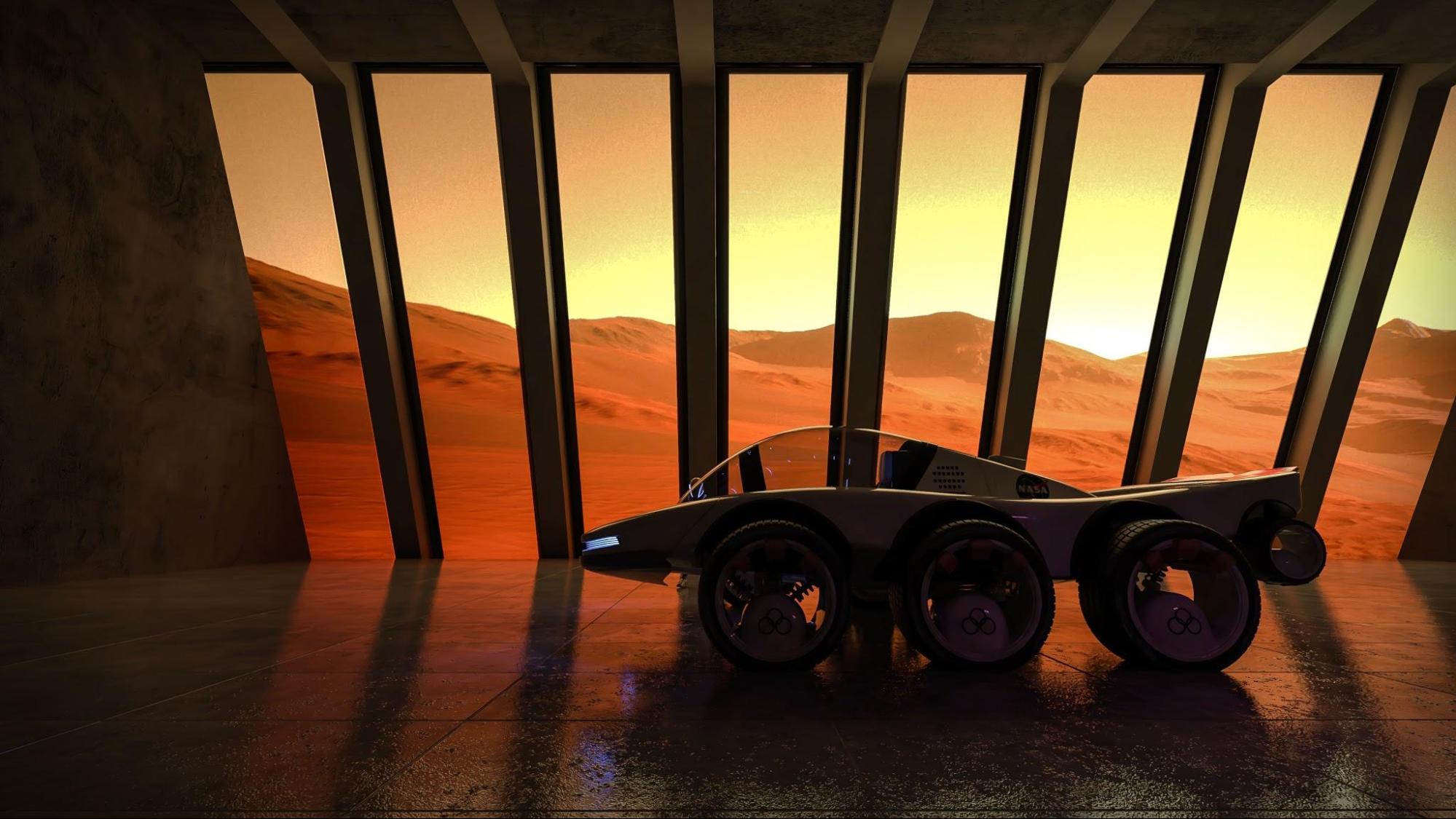
The idea for the NASA | ROVO concept (short for Remote Operations Vehicle and Observatory) originally came from reading various aerospace engineering and NASA articles, as well as receiving “public notice” emails seeking inspired designs for proposed future manned missions to Mars. I chose to focus on a land based single seater utility vehicle as a symbol for the unimaginable exhilaration and terrifying uncertainty of space exploration on an alien planet. The dichotomy where we find ourselves alone on a distant world, with nothing but machines to carry us across an endless desert, seems almost apocalyptic and fascinating to me. Almost like a scene out of Mad Max.

The shapes and forms used in the ROVO’s design language are inspired by the works of designer Daniel Simon, with heavy influence from the late designer Luigi Colani. Colani’s use of muscular curves, complex surfaces, organic tension and sculpted aesthetic helped inspire various prototype designs before making my way to the final iteration. The design was further inspired by movies such as The Martian, Oblivion, Interstellar and Blade Runner 2049. The belief that machines can be “biomechanical beasts” has been a guiding light in my mind. I do believe that while a concept design may not always be practical, there is always a place for organic forms to coexist within an engineering framework. I wanted something that emphasised organic forms inspired by nature, steering away from contemporary design, yet straddling the line between fantasy and reality. Natural shapes in various types of seed pods inspired the pontoons that make up the main chassis, while killer whale motion and form inspired the swooping nature of the overall design.
Ideation
During the ideation stage, I wanted to strike a mix between pure concept and near distant technical possibilities. I tried to stay away from “standard” geometric shapes and hard accent lines found in many of today’s automotive concepts. In this aspect, I found Blender to be a great tool in a “sculpted” approach to concept vehicle modeling, something I’ve done repeatedly in previous designs. Although Blender is not considered to be a “traditional” design choice in engineering design applications (compared to programs such as Catia, Alias, or Solidworks), I found it to be very valuable in the way it forced me to work and navigate the design. I feel that using Blender as a concept design platform imparts a unique character within the decision making process, therefore becoming an intricate part of the design. A particular challenge in using Blender for this automotive design project was in attempting to simulate Class A Surfacing. Using the guide mesh/shrink wrap method helped keep much of the original fluidity of the surfaces intact.
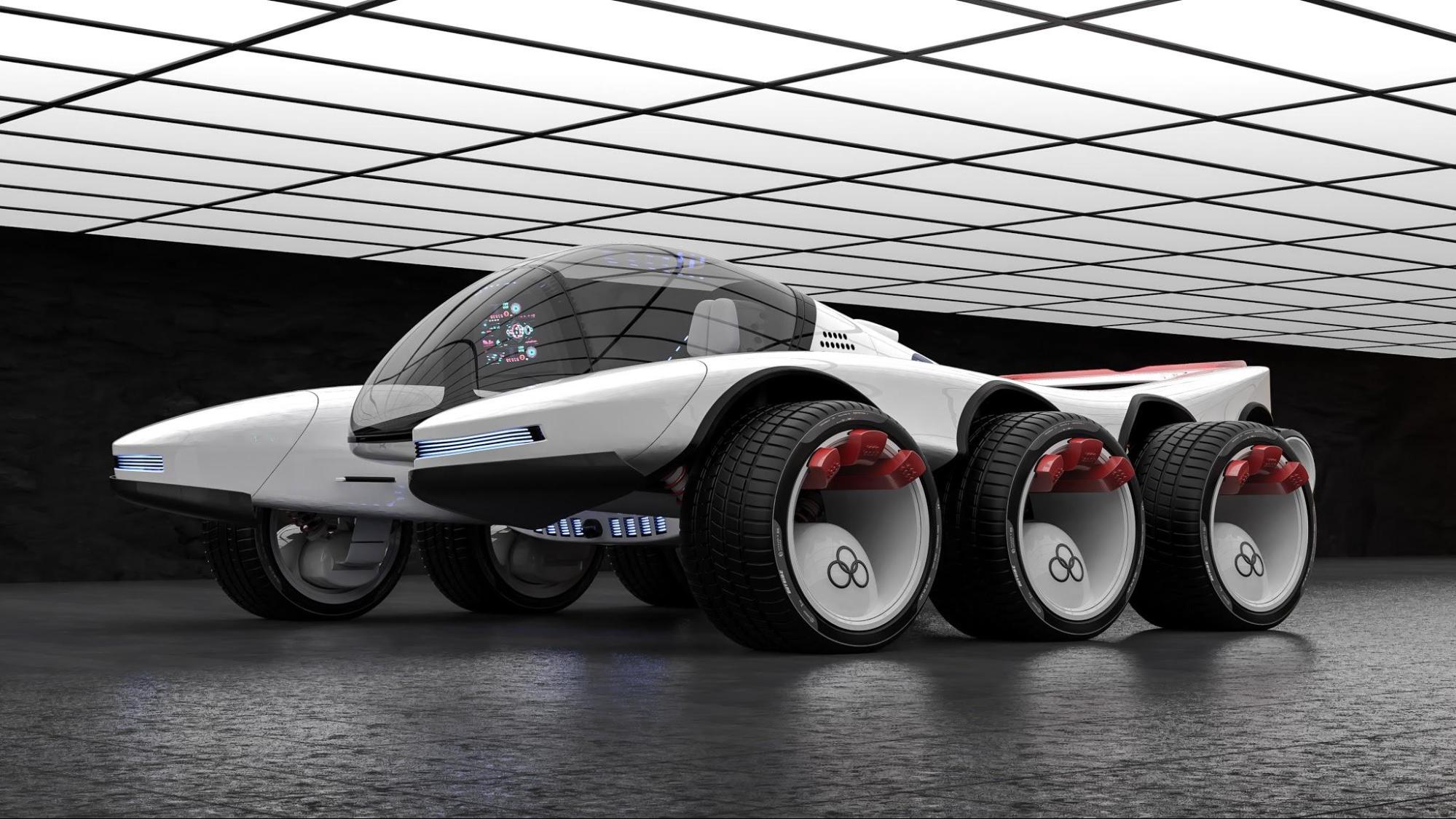
A part of the design decisions came from the engineering articles I had read months before. For example, designing the ROVO’s “Direct Drive” concentric electric wheel mounted motors struck me as a much more interesting design choice than the traditional power plant and drivetrain combo. Theoretically speaking, I figured that by redundantly designing the six individual sealed electric motors into each wheel and incorporating a triple redundant sealed braking system into each rim, it could help reduce the need for extra components and the exposure of mechanical components to harsh and potentially corrosive Martian atmospheric conditions.
Modeling (Blender 2.8)
To me, one of the most critical aspects of taking any design from start to finish comes in creating and organizing a logical structure and workflow. I know that a design will have to work through various phases, rejected models, design challenges and design comparisons, so I try to set up a logical folder system (now possible in Blender 2.8), that will cover most of those stages from the start. Since hand sketching is not a forte of mine, I create a curve network using a collection of bezier curves to form rudimentary shapes, proportions and profiles for ideation. The process of building and then pushing and pulling that curve network is my form of “sketching” from the idea I keep in my head. During this stage, I’ll set parameters such as establishing a wheel base, general dimensions, ride height, clearances, field of view, built around an anatomically correct posed human model. This is where I begin to flesh out the general outline of my design. In my experience, one of the biggest killers of inspiration and execution is lack of organization.
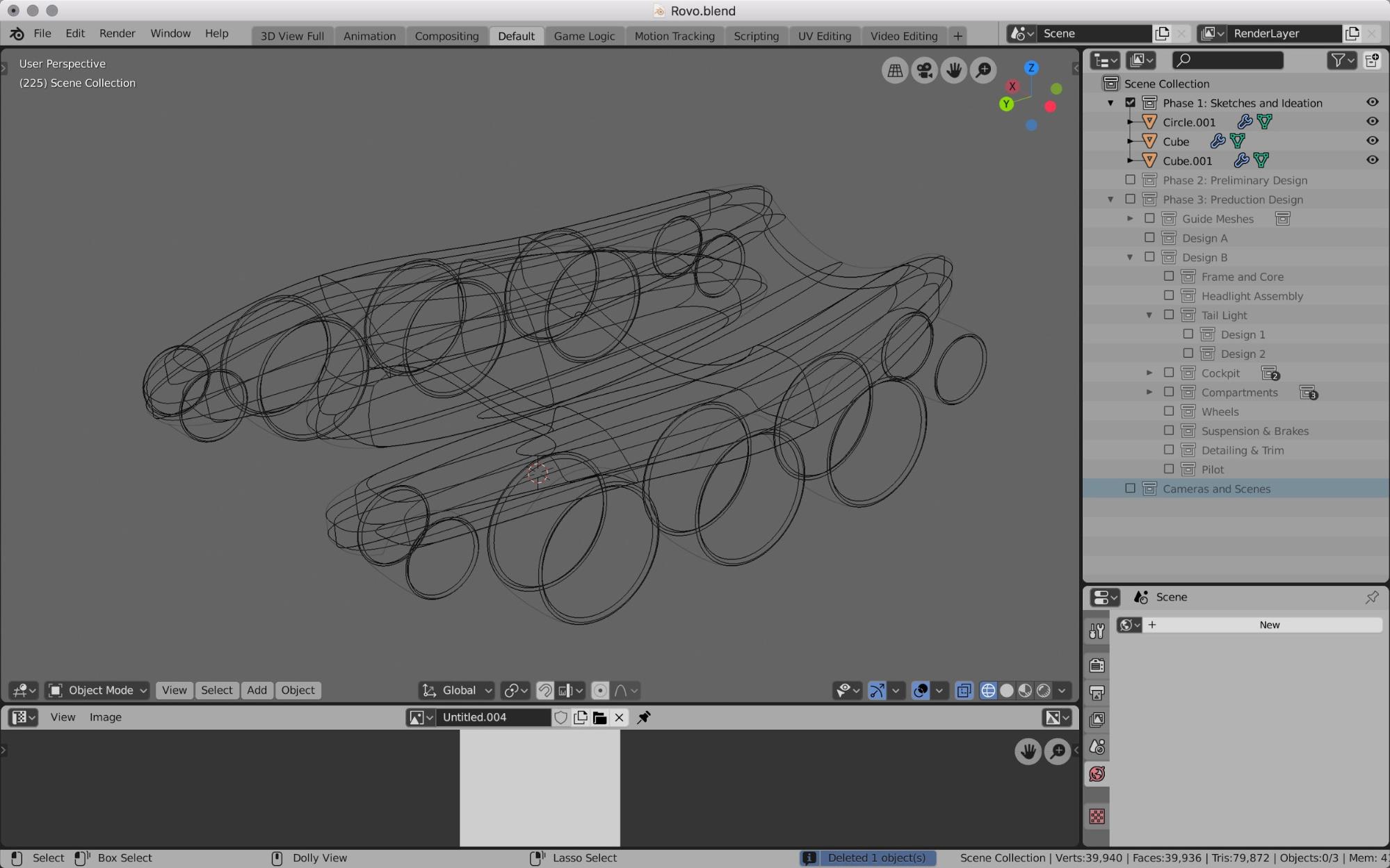
Reaching the stage where I finish the foundation, I began surfacing the curve network to form the overall solid model. In some ways, I think of this process as similar to the automotive clay shaping process, where the goal is to create a final solid body shape with all primary surfaces worked out. I usually use this solid body as a guide mesh for Blender’s shrinkwrap modifier later on, which helps in creating cutlines and working out general details (beltlines, front and rear fascia, profile, stance, baseline, etc). At this stage, I’ll usually run through different ways of shaping primary surfaces and tension points before settling on the final form that will become the final design. Since Blender doesn’t really have a way to build and verify class-A shapes, I put extra attention into the smoothness and continuity of every surface, constantly examining every inch for flaws or defects in the surface geometry. Basically the point is to follow and adhere to the principles of 3D modeling to ensure a clean final look, much like you would find in Class A surfacing.
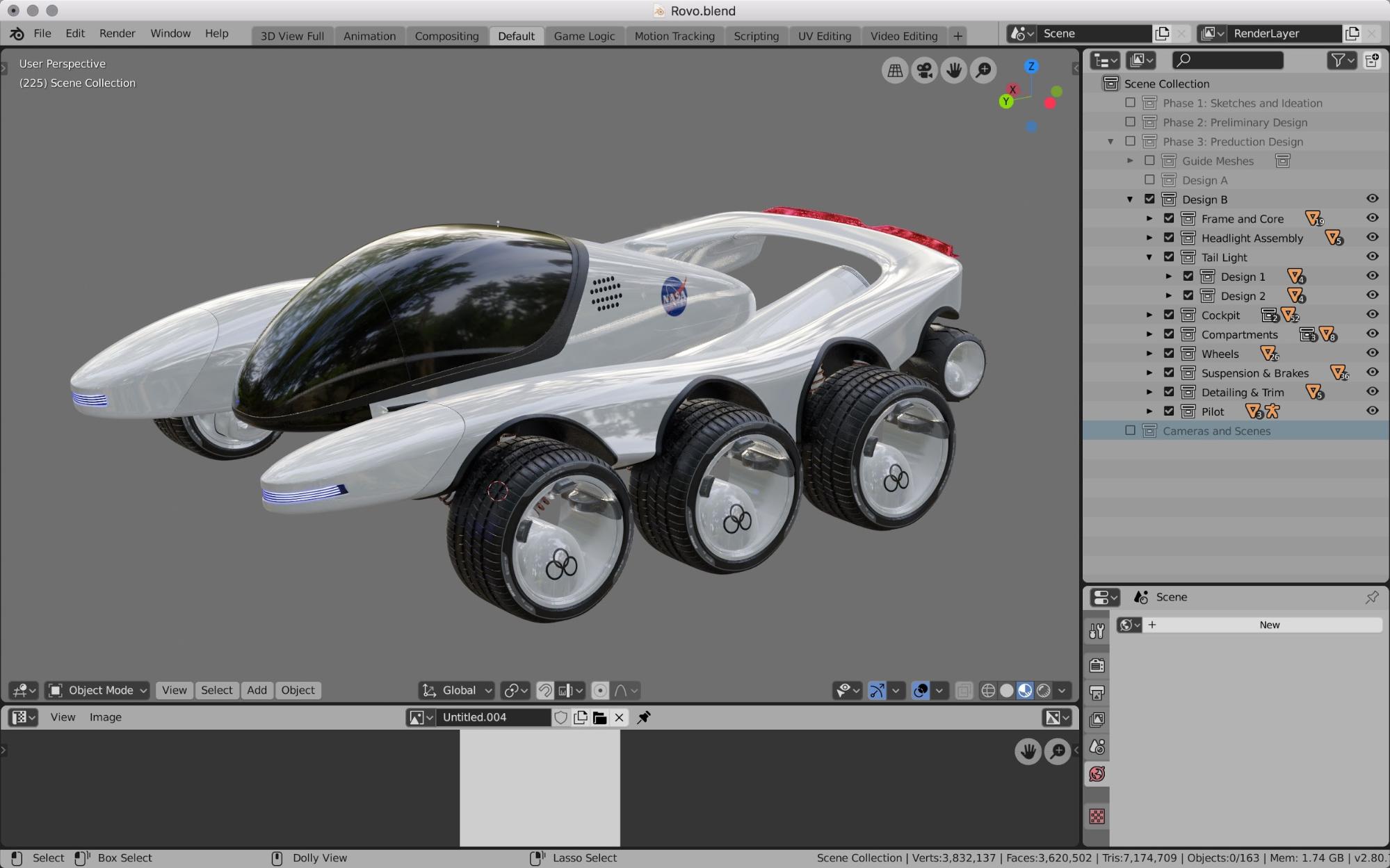
Once I’ve committed to the solid body shape, I begin designing and working out all the secondary components to the design. In order to stay true to my workflow, I don’t worry about the details in the design, but rather all the general panel cuts, cockpit windows, compartments, wheels, tires, headlights, and basic framing. I’ll create basic “placeholder” objects, such as dummy wheels, to help get an idea of the concept before working out the details later on.

As the model forms and I slowly work out my design decisions, I begin to transition individual vehicle components and sub-assemblies into the folders I created at the beginning of the project for further detailing. For example, anything related to the ROVO cockpit was placed into a “cockpit” folder, allowing me to isolate and focus on the cockpit details later on. In this process, I may add or remove folders as I go on, depending on the project.

Since I know my final design is aiming for a “real world” aesthetic rather than a concept sketch or concept art look, I try to think of as many of the real life details this concept would have if I were to see it in person. As a concept design, I don’t think of this technically as I do creatively. As the model develops, I’ll begin to carve out details such as trim lines and airlock seals, panel fitment, cockpit details, vents, etc.
JR Rovo – Field Support and Research Drone
Another detail to the ROVO concept package was the addition of a small drone that travels within a rear compartment of the ROVO and could be deployed in a supportive role on research expeditions. This became the JR Rovo, which began as a panel cut at the rear portion of the ROVO, and developed independently before being brought back into the main ROVO Blender session. A level of care was taken to make sure the JR ROVO could rest snugly into the rear compartment of its host.

Texturing, Scene Building, and Rendering
I knew early on that I wanted to use Blender’s Cycles engine and Keyshot 8 as my render platforms. When it came time to create textures and scenes, I knew that I had to mimic identical textures in two completely different programs. It’s a skill I’m still learning, but have been able to get by in by bringing in various textures that I’ve either designed or collected throughout the years.
For Blender scene rendering, I turned to some previous node setups I learned in CG Master’s Corvette Tutorial. In particular, I used Chris Plush’s amazing tire node setup and automotive paint node setup, which I used in the creation of my previous Hyperlight Icon concept design project. I used a variation of these node setups for the ROVO Studio Render and basic product renders.
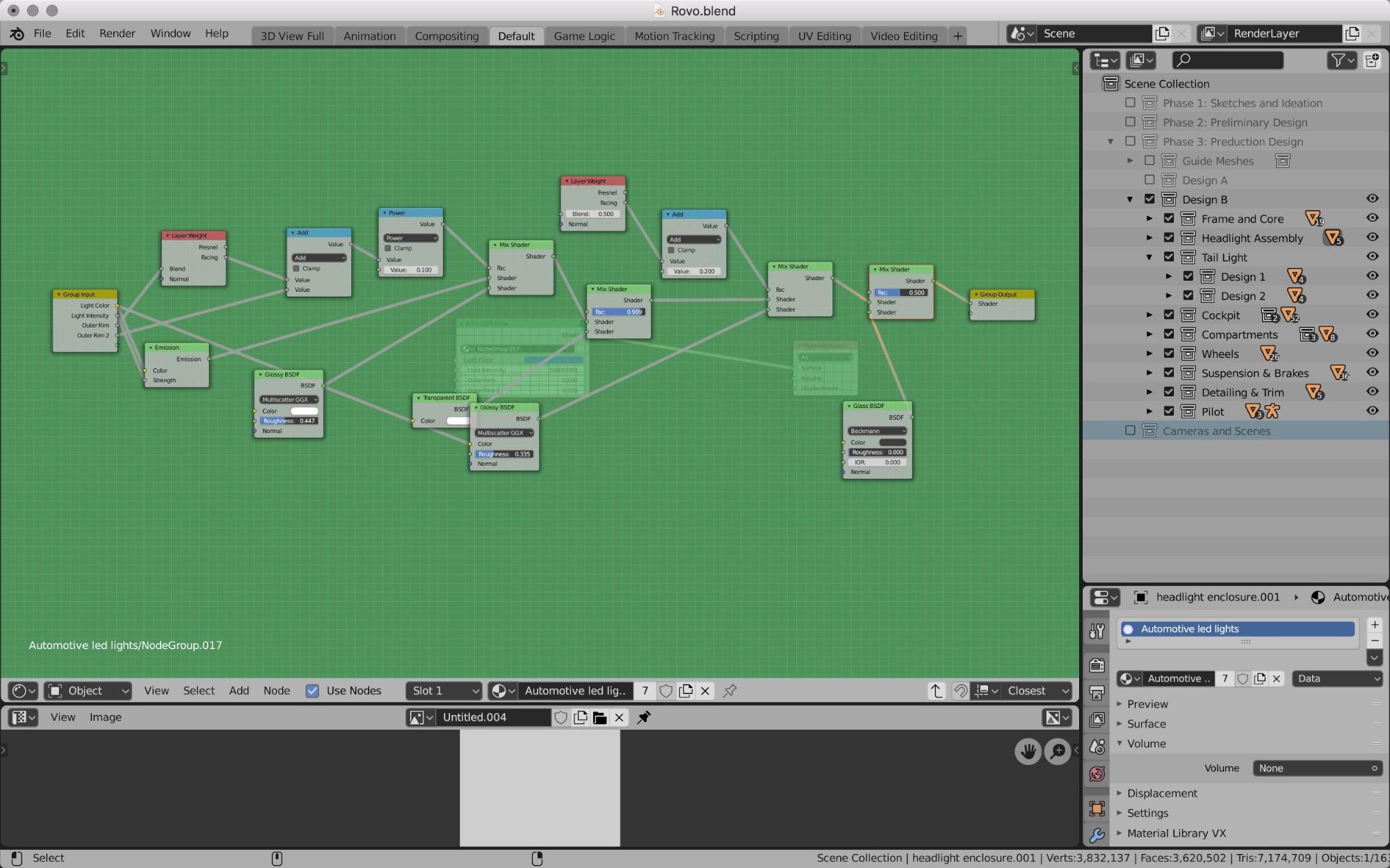
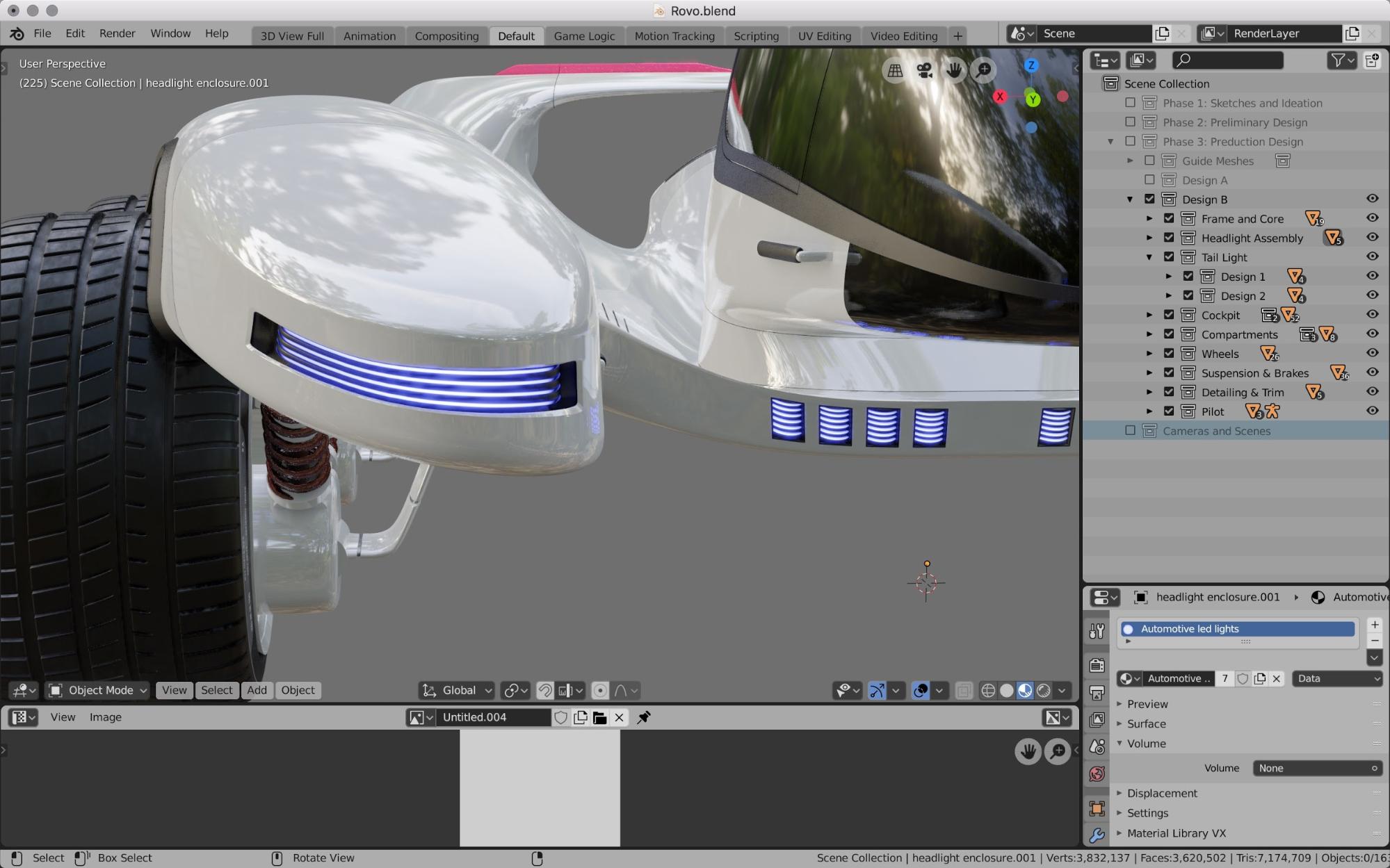
The final challenge, something I was never really happy about in previous designs, was creating a “light strip encased in glass” texture. I knew I wanted the lighting to shine brightest at the core of the strip, always facing the camera, surrounded by a gradually darkening hue around the edges of the strip. After a couple of days of trial and error, I was able to finally create a node setup to reflect the look I was going for. Blender’s new EEVEE engine was instrumental in helping me closely gauge my final textures in Cycles.
For the outdoor Martian scenes, deployment bay (Batman Garage Scene), and Martian indoor sunset scene, I turned to Keyshot 8 for creation of my renders. Having access to both Blender and Keyshot, it came down to personal preference as both render platforms are very capable in my eyes. The decision to go to Keyshot for the more complex renders came out of a certain aesthetic I felt was more appropriate for this project and it was my first time using Keyshot more heavily in the rendering process. Blender’s compatibility with Keyshot in keeping mapped textures and importing cameras helped greatly. It allowed me to establish as much of my camera shots as possible in Blender before importing them into Keyshot for final tweaking.
Both processes used textures from Poliigon’s free texture packs. I used the Ground Clay texture pack to create a basic Martian ground texture, Metal Panel texture pack for all indoor flooring, Plaster texture pack for all concrete walls, and the Cliff Jagged texture pack for the rocky walls in the “Batman Garage” scene. The indoor scenes were lit mostly via an emissive background images node, with the exception of the deployment bay, which was also lit via an area light from above. For the outdoor scenes, I used various royalty-free Martian backgrounds that would be applied post-render (I render with transparent backgrounds).


Touching Up and Final Presentation
As I collect the unedited rendered images, I bring my images together with their backgrounds in Adobe Photoshop and then finalize them in Adobe Lightroom. Once I started building a final render “gallery”, the final piece of the puzzle was to figure out how I wanted to present this concept. I immediately remembered the books I used to read in my younger years, such as the Incredible Cross-Sections of Star Wars: The Ultimate Guide to Star Wars Vehicles and Spacecraft.
In my previous projects, I’ve enjoyed thinking about basic specs and descriptions that would help immerse the viewer a little bit further into the design, regardless of how technically accurate the specs are. The ROVO, however, was the first time I developed a full narrative in which it plays a small, yet important role in a larger fictional backstory of Martian colonization. I turned to Daniel Simon’s Cosmic Motor series for inspiration, as well as revisiting some of the older concept books I enjoyed reading as a kid. Much like a painting, I’ve always felt that the narrative behind an original concept adds another dimension beyond just visuals. Aside from the tactical suit renders, the royalty free graphics used to create the storyline images came from Pixabay. Behind that inspiration came the NASA: Mission Exodus narrative that describes the ROVO existing as part of a greater mission to preserve mankind’s survival.
In the end, these projects are studies in design, a form of expression and exploring ways to present form in my own interpretation. I’ve never been interested in replicating something existing, rather creating things that do not yet exist.
About the Author
 Lee Rosario, Professional 3D and 2D cad designer based out of Orlando, Florida with experience in mainstream music media, engineering, and graphic design industries.
Lee Rosario, Professional 3D and 2D cad designer based out of Orlando, Florida with experience in mainstream music media, engineering, and graphic design industries.



{kind=link}
{kind=link}
Awesome work! Enjoyed reading your workflow. Fantastic results.
One question on your design…how does the astronaut enter in/out of the vehicle?
Thanks Aug!
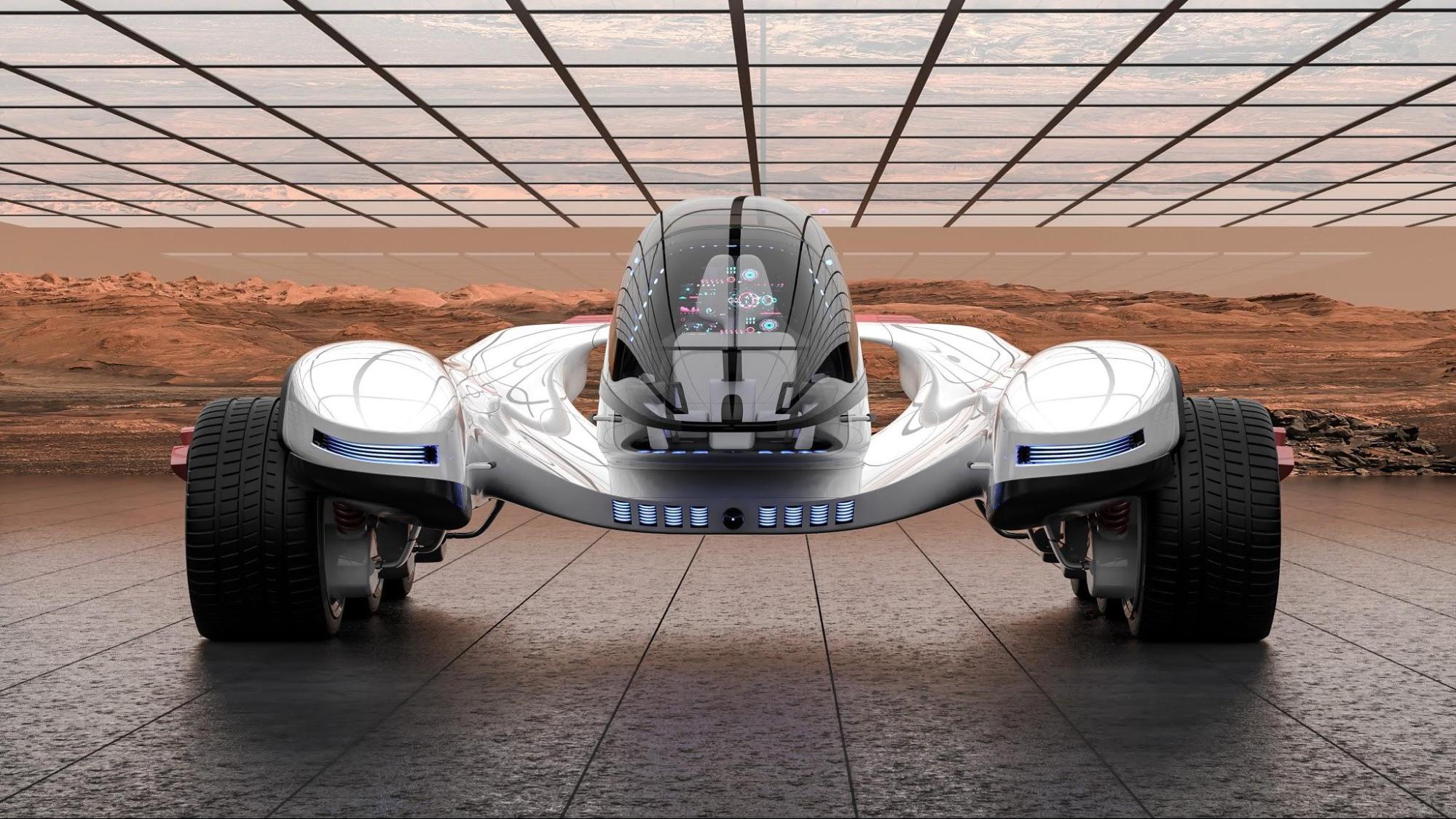
I didn’t animate a render showing it, but the glass cockpit opens up much like a figher jet.
Thanks Aug!
I didn’t animate a render showing it, but the glass cockpit opens up much like a figher jet.
I kinda thought the glass dome must open but was more wondering how a fully suited astronaut was going to negotiate getting into and or out of your concept rover. As a designer myself I was looking at it from an ergonomic aspect…basically what kind of movements would be required for a person in a already cumbersome space suit to access the cockpit?
Thanks again for sharing your great Blender design!
also, this is assuming the suit designs are compact enough to allow for more flexible movement. If this suit had been cumbersome like a traditional astronaut suit, this of course would have to be redesigned to account for that lack of mobility. In my concept, I imagine suits have evolved enough to be form fitting and more dynamic in motion than what we have now.
good question, the cloest image I have to demonstrate this would be here: https://mir-s3-cdn-cf.behance.net/project_modules/fs/b7cbf485116303.5d71d30600a9f.jpg
Basically the driver enters via either side of the cockpit through a set of handle bars where they would prop themselves up. I thought about a retractble ladder system, but I didn’t get far enough into the design to model that into the chassis. Good question.